原文转载:高工机器人 上半年斩获两次融资,这家3D视觉企业勤修“内功” (qq.com)
当资本市场开始变为理性时,资本对初创公司的投资决策中对于企业是否能实现稳定盈利,以及是否能保证稳定现金流的考量进一步提升。
从“狂热”到“理性”,3D视觉行业成为体现投资人决策考量转变的行业之一。

硬件≠人+钱
软件数量>硬件三倍=企业平衡
费浙平介绍,在工业机器视觉平台软件上,目前主流应用软件是国外的VisionPro和Halcon等,生态系统基础好但是局限于2D且收费高昂,面向3D的视觉平台软件目前仍缺位严重。
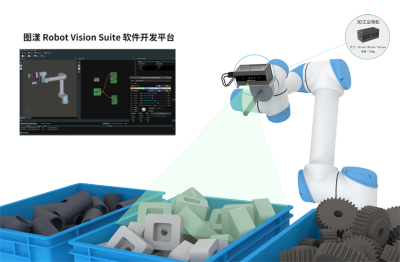
对此,RVS机器视觉开发平台通过内置大量的2D/3D视觉算法库、机器人运动规划库、手眼标定、机器人运动模拟仿真工具等功能模块,支持Windows/Linux操作系统下全流程的低代码拖曳式开发和高仿真可视化的直观操作,开发者无需了解底层技术,即可高效实现物体识别和分割、机器人引导、运动规划和手眼协同等应用的二次开发。此外还可在客户自有系统中集成,极大程度降低项目开发难度,缩短开发周期,方便客户快速部署应用。
RVS机器视觉开发平台主要瞄准的是与工业机器人搭配使用的“手眼协同”的场景,目前,该平台已经超300+客户在使用。
今年为了进一步巩固软件的能力,图漾科技即将推出Vision++ 3D机器视觉开发平台和RVS-SE标准化拆垛软件平台。
Vision++ 图漾科技自主研发的一款基于Windows平台的3D机器视觉二次开发软件。开发者可基于软件向导式的流程布局,低代码拖拽快速完成视觉项目的开发调试和部署,支持丰富2D/3D算子工具、算子自定义开发、图形化界面、用户一键调参界面显示等丰富功能。可满足高精度视觉定位、工业测量、缺陷检测、图形信息识别等多样机器视觉应用。
费浙平介绍:“与RVS机器视觉开发平台不同的是,Vision++ 是一个真正的二次开发平台,只要是通用的视觉算法和应用软件都可以在Vision++ 平台上使用,可以在任何场景里进行二次开发。”
RVS-SE是RVS机器视觉开发平台的简化版,应用在拆垛场景。RVS-SE主要由图漾核心自主专利的3D工业相机、深度学习算法及自主研发的RVS-SE专用拆垛软件、机械臂(可选)、工控机等模块构成。结合3D视觉、深度学习及RVS-SE软件,融合3D数据采集、3D点云分割、深度学习算法及运动规划控制技术,实现对箱型/软包垛型的实时三维定位,引导机械臂进行高精度、高稳定的智能自动化拆垛,安全便捷易维护,兼具性能-性价比优势,在实际应用中具备“机器换人”价值,为企业用户提质降本增效。
在费浙平看来,拆垛目前在自动化行业里是数量和需求应用最多的场景,机器人手眼协同的应用,80%-90%都应用在拆垛上。
“所以无论是从市场需求,还是从技术能力角度来讲,拆垛应用场景可以标准化,傻瓜化,不需要任何的二次开发。RVS-SE就是专门为拆垛场景应运而生的软件。”
总体而言,作为一家稳扎稳打的产品公司,图漾科技有着自己的一套商业逻辑。竞争策略不是一开始就是入局高端场景,瞄准则是中端场景,最后再以中端场景的优势和经验逐一渗透到高端场景中,以极致性价比的优势,提供优质的服务。
接下来,图漾科技将持续投入技术研发,以3D机器视觉独立供应商的商业模式,支持多行业集成商客户端工程落地,以提高公司产品性能及整体解决方案能力。