











单件分离
方案组成
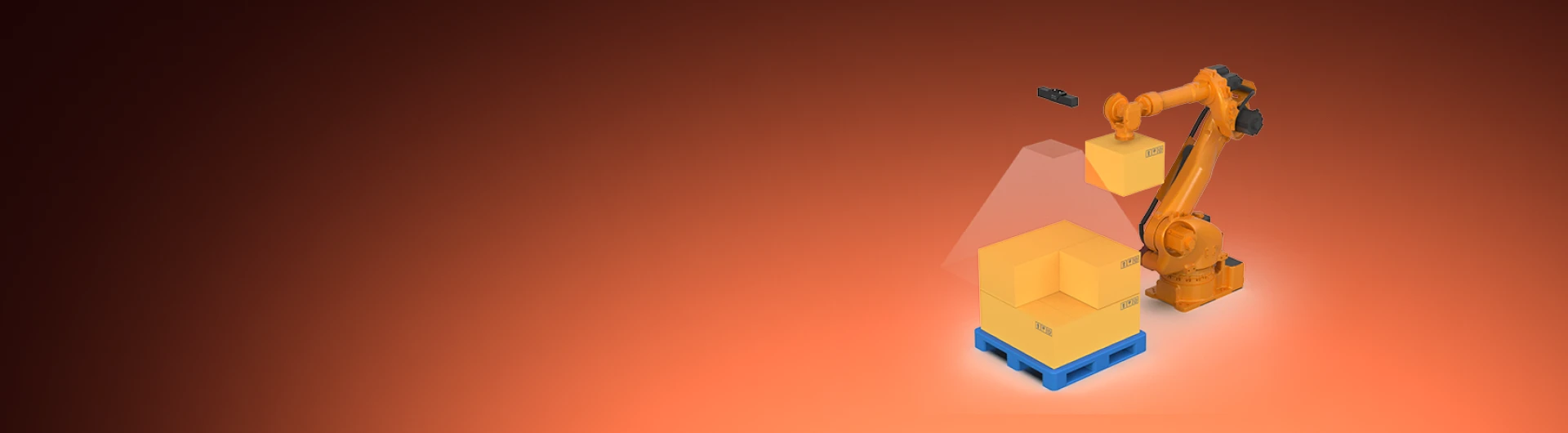
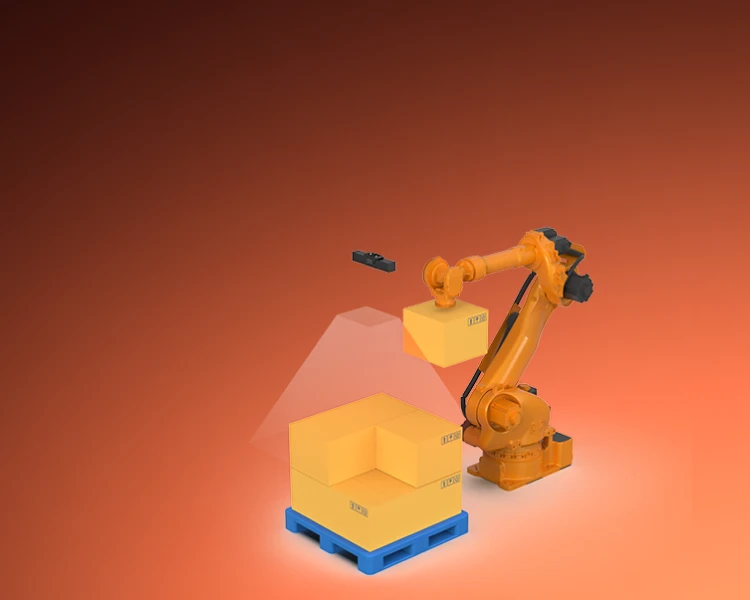
方案采用3D相机视野覆盖整个皮带电机,实时识别物体的尺寸和空间位置、计算并控制不同单元电机的速度差实现包裹的分离、拉距和排队,使杂乱的包裹按照指定间距变成单列进入后端的高速自动分拣线。根据不同分拣中心的处理包裹尺寸和吞吐量要求,图漾提供单相机和多相机方案,及完整的物体识别分割和电机控制软件系统
优势 描述
-


标准化方案,适配多种现场部署方案
-

支持单相机或多相机方案,满足不同长度、宽度和高度需求
-

不同配置方案可支持每小时6000-10000件吞吐量要求
-

正确识别和处理不同形状物体,准确率高达98%以上

