




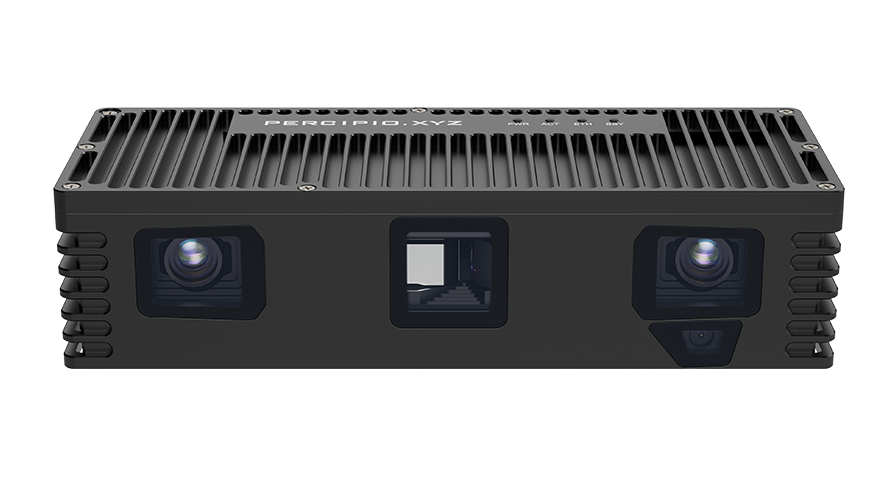







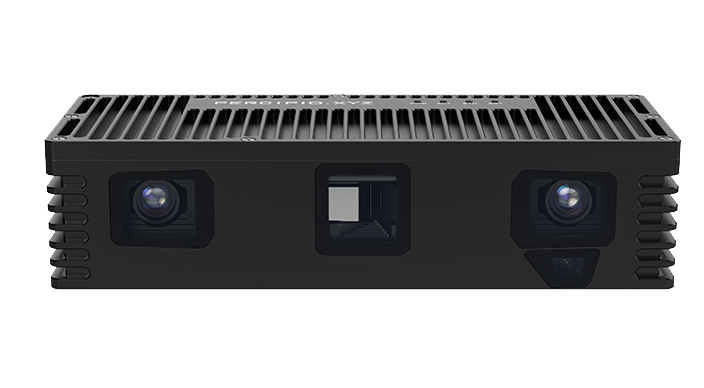
VMD02-5011
三维智能相机,基于主动双目视觉技术,相比传统双目,景深表现更优、环境适配性更强,赋能多领域智能化应用。
-

 双目条纹结构光
双目条纹结构光 -
 工作距离0.5-1.1m
工作距离0.5-1.1m -
 最大深度分辨率20480*1536
最大深度分辨率20480*1536 -
 千兆以太网
千兆以太网 -
 防护等级IP65
防护等级IP65
-
技术规格
-
产品特点
-
下载中心
向左滑动
| 技术原理 | 双目+条纹结构光 |
| 激光波段 | 635nm(红光) |
| 光源 | 激光 |
| 快门类型 | Global |
| 出图延迟时间 | ~1950ms@Standard ~2300ms@Quality ~1770ms@Fast |
| 帧率@分辨率(深度) | up to 1.14FPS @ 2048 x 1536 /1024 x 768 / 512 x 384 |
| 帧率@分辨率(彩色) | / |
| RGB-D对齐 | 支持 |
| 输出图像 | 深度图、灰度图、点云图 |
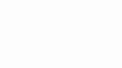
| Z精度 | 0.030 @ 500mm 0.055 @ 660mm 0.130 @ 1100mm |
| XY精度 | 0.25 @ 500mm 0.33 @ 660mm 0.55 @ 1100mm |
| 视场角FOV (H/V) | max 51°/41°±3° |
| 基线 | 180 |
| 推荐测距范围 | 500-1000 |
| 最大测距范围 | 500-1100 |
| 近视场 | 482 x 382 |
| 远视场 | 986 x 831 |
| 主机操作系统 | Linux/Windows/ROS |
| 软件开发包 | Percipio Camport SDK; 支持 C、C++、C#、Python 等 |
| 尺寸 | 268 mm x 105 mm x 65 mm |
| 重量 | 2080g |
| 数据接口 | 千兆以太网 |
| 网络接口 | M12 X-Code 8孔航空接⼝ |
| 触发及电源接口 | M12 A-Code 8针航空接⼝ |
| 功耗 | ≤ 24 W |
| 外壳材料 | 铝合金 |
| 防护等级 | IP65 |
| 散热方式 | 被动散热 |
| 安装方式 | 机械固定 |
| 供电电压 | DC 24 V ~ 48 V |
| 工作温度 | 0 ~ 40℃ |
| 存储温度 | -10 ℃ ~ 55℃ |
近视场
482 mm x 382 mm @ 500 mm (H/V:约 51°/42°)
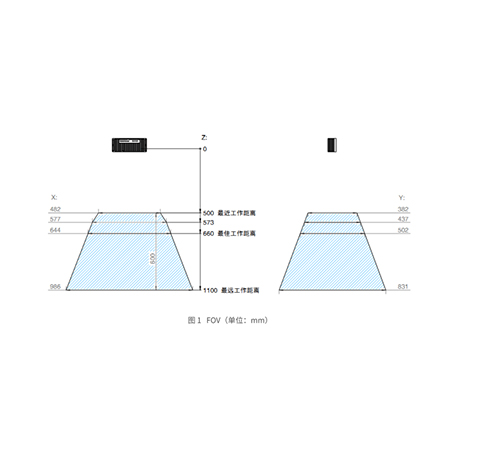
尺寸图
软件文档
-
 软件平台在线使用文档版本号 :更新日期 : 2026-05-06
软件平台在线使用文档版本号 :更新日期 : 2026-05-06 -
 RVS开发者论坛版本号 :更新日期 : 2026-05-06
RVS开发者论坛版本号 :更新日期 : 2026-05-06 -
 RVS_SE软件版本号 :更新日期 : 2026-05-06
RVS_SE软件版本号 :更新日期 : 2026-05-06 -
 ROS_Github版本号 :更新日期 : 2026-05-06
ROS_Github版本号 :更新日期 : 2026-05-06 -
 ROS_Gitee版本号 :更新日期 : 2026-05-06
ROS_Gitee版本号 :更新日期 : 2026-05-06 -
 Halcon_Github版本号 :更新日期 : 2026-05-06
Halcon_Github版本号 :更新日期 : 2026-05-06 -
 Halcon_Gitee版本号 :更新日期 : 2026-05-06
Halcon_Gitee版本号 :更新日期 : 2026-05-06 -
 Camport SDK_Github版本号 :更新日期 : 2026-05-06
Camport SDK_Github版本号 :更新日期 : 2026-05-06 -
 Camport SDK_Gitee版本号 :更新日期 : 2026-05-06
Camport SDK_Gitee版本号 :更新日期 : 2026-05-06

