











RVS-SE 标准拆垛方案
主要特点与优势
-

 支持瓦楞纸箱和软包装的多种堆叠方式
支持瓦楞纸箱和软包装的多种堆叠方式 -
 无代码软件易于部署和维护
无代码软件易于部署和维护 -
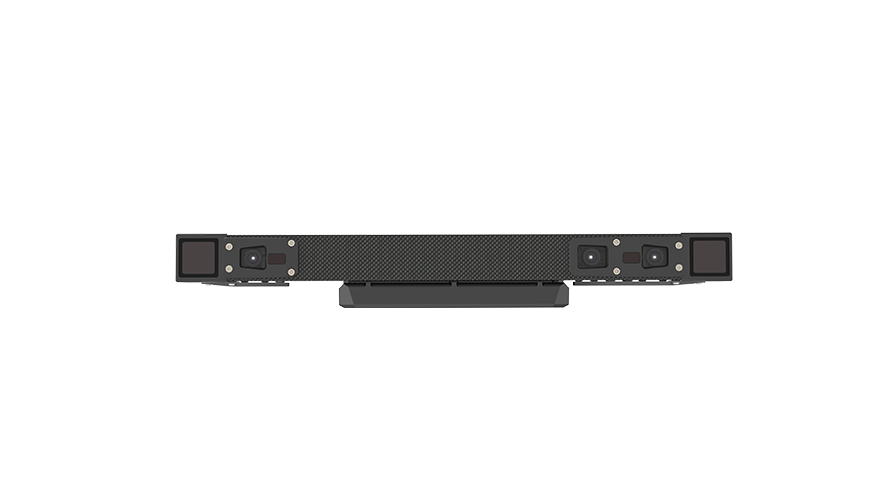
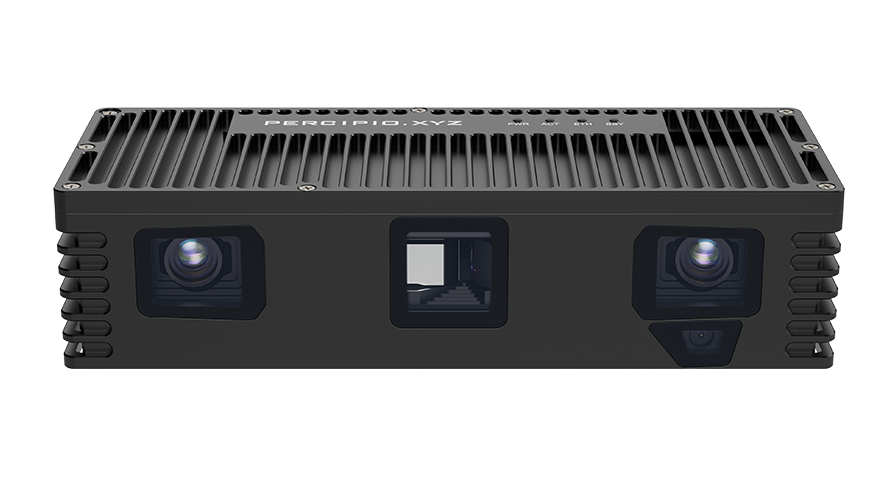
 三种相机配置,满足各种场景需求
三种相机配置,满足各种场景需求
解决方案功能概述
-
托盘拆解功能
-
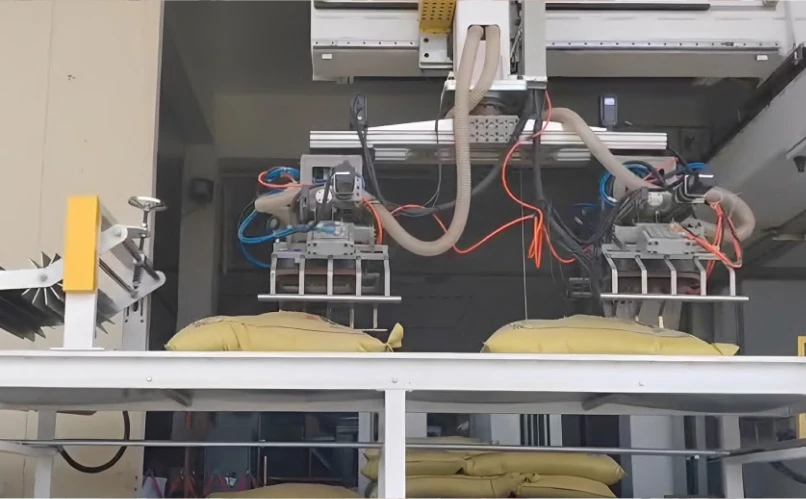
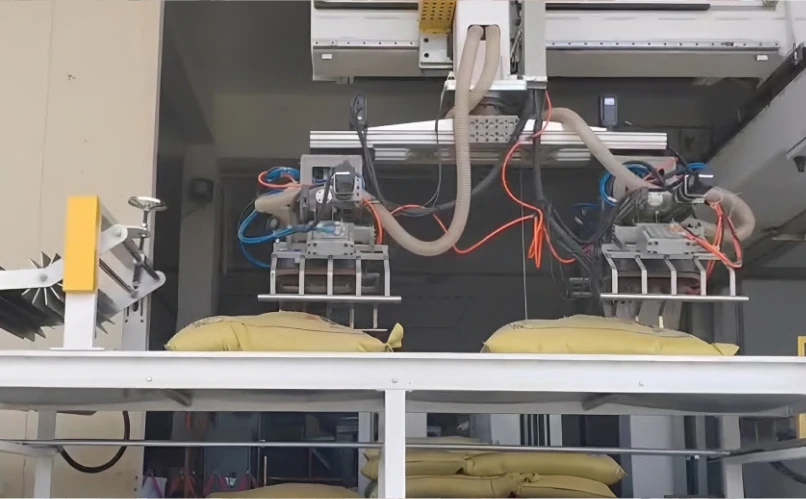
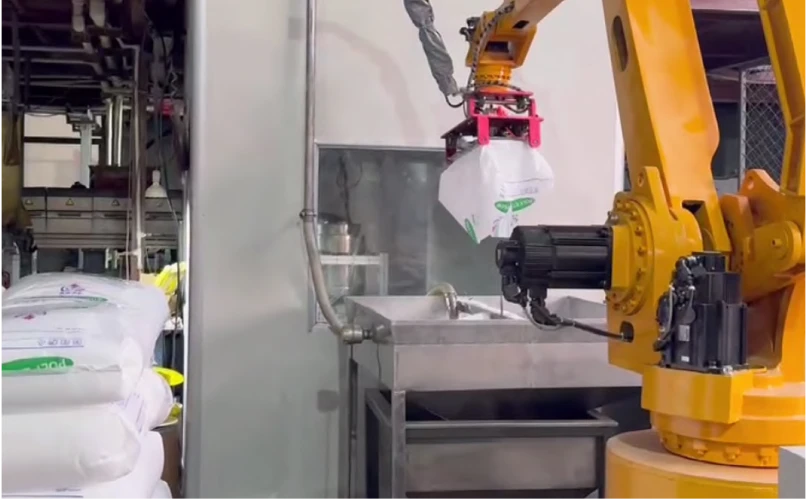
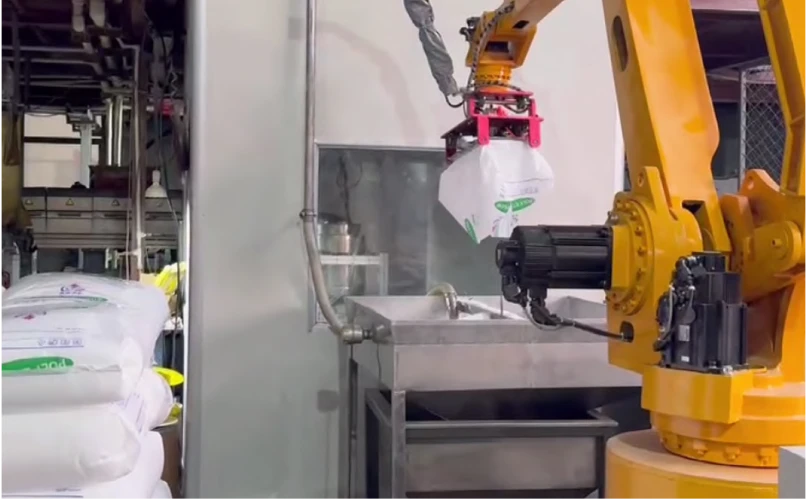
软包装卸垛
-
纸箱拆垛
-
-
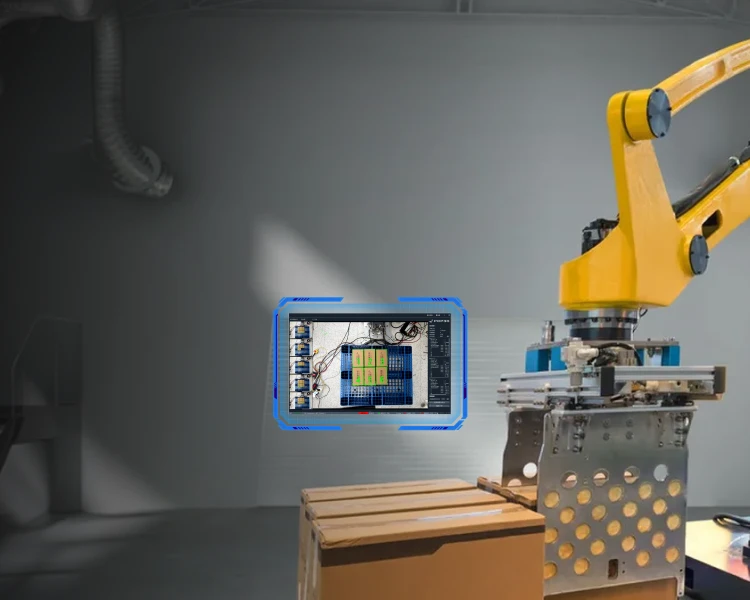
应用场景
-
户外/半户外设备退役
-
-
配套软件
-
无代码解决方案配套软件
-
-
行业
-
电子商务物流行业
-
服装制造业
-
原材料加工业
-
食品加工业
-






产品成分

产品成分
-
01

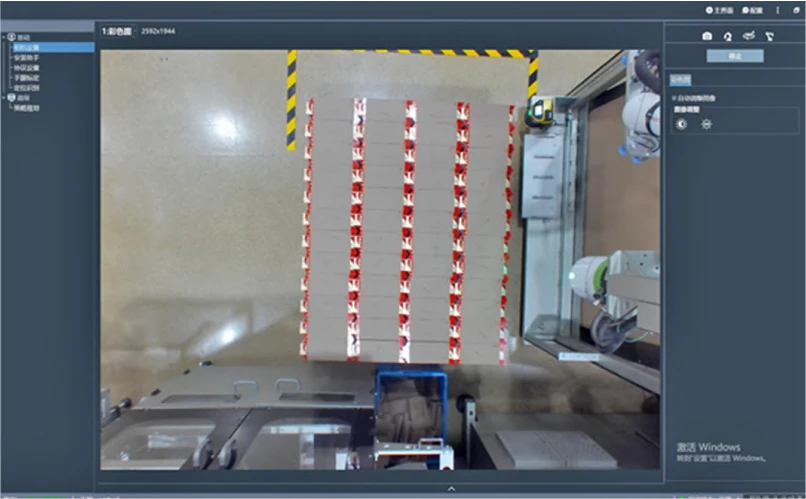
安装3D相机 部署工业计算机

-
02

配置 SE 软件 检查图像质量 计算识别准确率
-
03

对接机器人通信
-
04

压力测试
-
05

正式发布
-
06

手眼协调校准
-
07

定位、调试、验证捕获精度
规格
向左滑动
| 搭配相机 | RVS-SE-A | RVS-SE-B | RVS-SE-C |
| 垛型 | 支持常见纸箱 / 软包垛型 (如 1.2 m × 1.2 m × 1.8 m 尺寸) | 支持常见纸箱 / 软包垛型 (如 1.2 m × 1.2 m × 1.8 m 尺寸) | 支持常见纸箱 / 软包垛型 (如 1.2 m × 1.2 m × 1.8 m 尺寸) |
| 单拆 / 混拆 | 标准方案不支持混拆 | 标准方案不支持混拆 | 标准方案不支持混拆 |
| 软件识别时间 | 2.3s | 1.6s | 1.1s |
| 节拍 | 整体实际节拍与布局、末端执行器及后续工艺相关 | 整体实际节拍与布局、末端执行器及后续工艺相关 | 整体实际节拍与布局、末端执行器及后续工艺相关 |
| 工作距离 ( 距最远处的 箱 / 袋的距离 ) | 3.5m | 3.0m | 3.5m |
| 机器人品牌 | 可适配各种主流品牌机器人 | 可适配各种主流品牌机器人 | 可适配各种主流品牌机器人 |
| 通讯协议 | 支持 TCP、Modbus、S7 等协议,适配各种 PLC | 支持 TCP、Modbus、S7 等协议,适配各种 PLC | 支持 TCP、Modbus、S7 等协议,适配各种 PLC |
| 适配场景 | 室内 | 室内 | 室内 / 室外 |
| 安装方式 | 固定安装 | 固定 / 机械臂上 | 固定 / 机械臂上 |
案例研究视频
-

各种正宗的办公室
supplies

